top of page
Our Robot Nessy (2022)
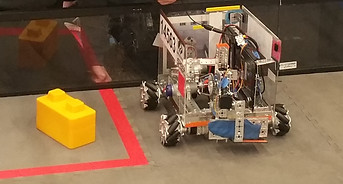
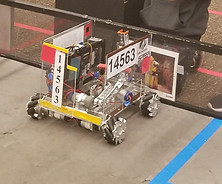
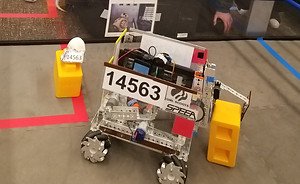
This year we created a smaller chassis to increase maneuverability. We decided that a smaller chassis with mecanum wheels would be important and would give us flexibility in strategy. We also used a 4-section Viper Slide as our primary lift arm in order to pick up cones and place them on three junctions. Additionally, our robot is covered in plexiglass to prevent other objects from interfering with our robot.



Our robot from previous years





T
e
r
r
i
i
f
c
T
e
c
h
B
T
s
FTC TEAM 14563 | est. 2014
bottom of page